kWh i ackumulatortankar
Experiment med HC-12 transceivers

Displayen visar temeperatur pûË 5 punkter pûË ackumulatortanken.
Med temperartur och berûÊknad kWh.
Shunten visar raw vûÊrden direkt frûËn potentiometern.
NûÊr jag vet grûÊnsvûÊrden, kommer den att gûÑras om till procent.
Status frûËn elpatronen visar vitt vid av, och rûÑtt vid pûË.
Total visar hur mûËnga kWh som finns i tanken och procent laddat.
Med temperartur och berûÊknad kWh.
Shunten visar raw vûÊrden direkt frûËn potentiometern.
NûÊr jag vet grûÊnsvûÊrden, kommer den att gûÑras om till procent.
Status frûËn elpatronen visar vitt vid av, och rûÑtt vid pûË.
Total visar hur mûËnga kWh som finns i tanken och procent laddat.

Motor fûÑr shunten
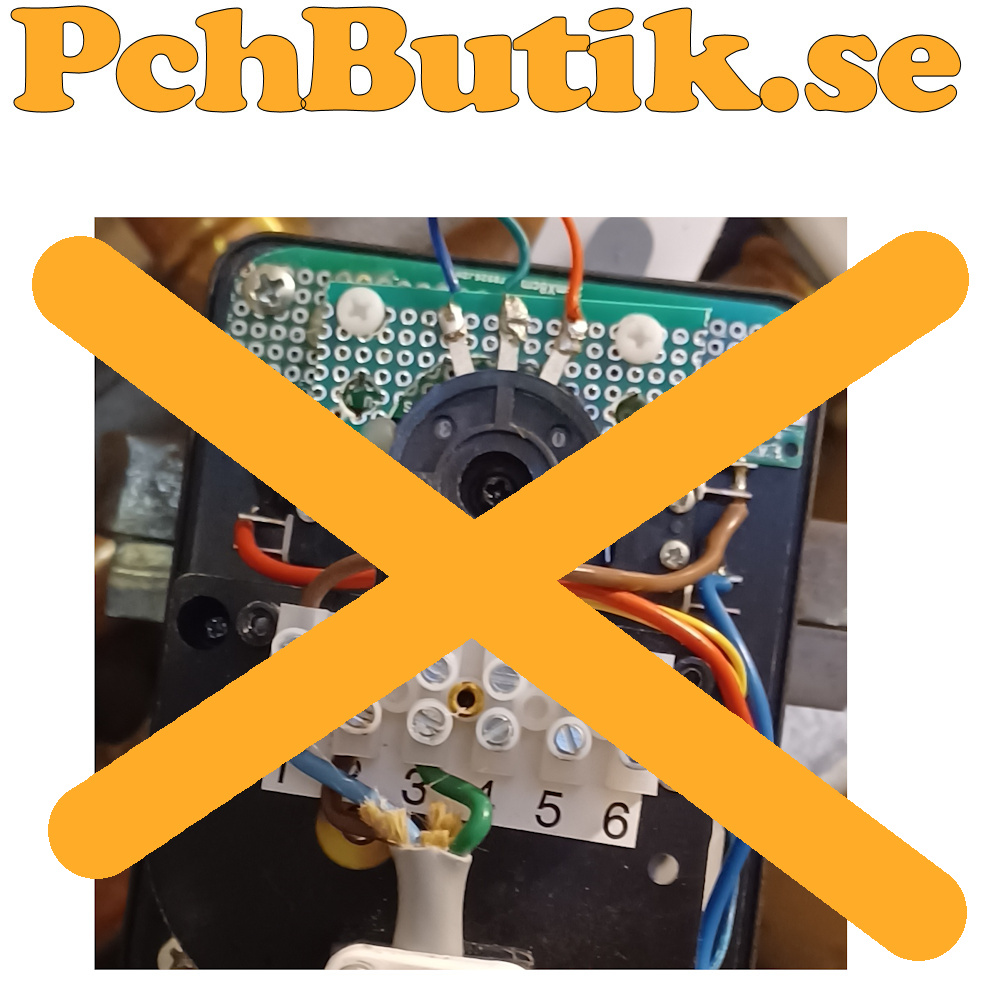
Se uppdatering Potentiometer pûË shunt

En universal shield till Uno har XH2.54 kontakter
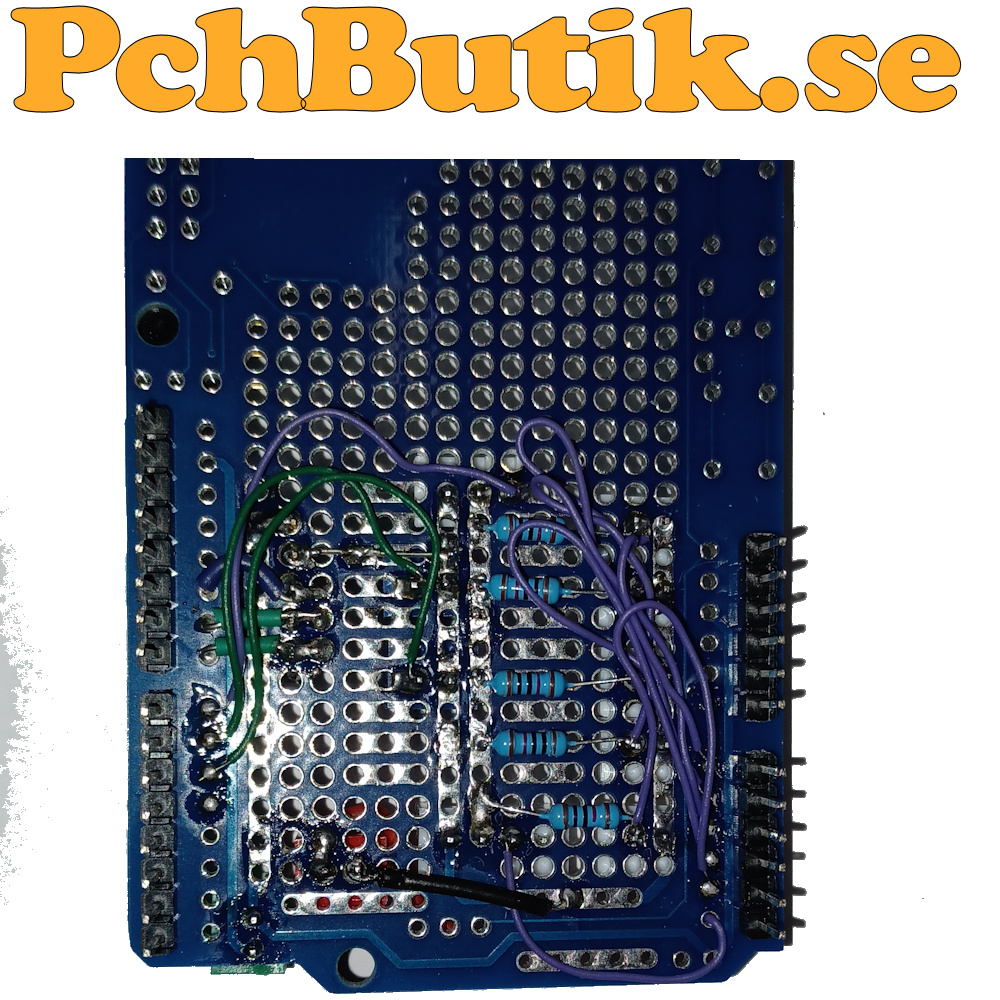
Och nûËgra pull-up motstûËnd ûÊr kopplade till XH2.54 kontakterna pûË10K

Uno kort med shielden monterat i en lûËda med en step-down converter till 9 Volt
SûÊndaren HC-12 ûÊr monterad stûËende pûË shielden och en extern antenn pûË lûËdan.
SûÊndaren HC-12 ûÊr monterad stûËende pûË shielden och en extern antenn pûË lûËdan.

Den externa antennen med smûÊlt lim som stûÑd.

En av de 5 temperatursensorerna som ûÊr NTC10K och ett 10K motstûËnd pûË shielden.

PûË elpatronen ûÊr en ljussensensor monterad med skydd fûÑr solljus.
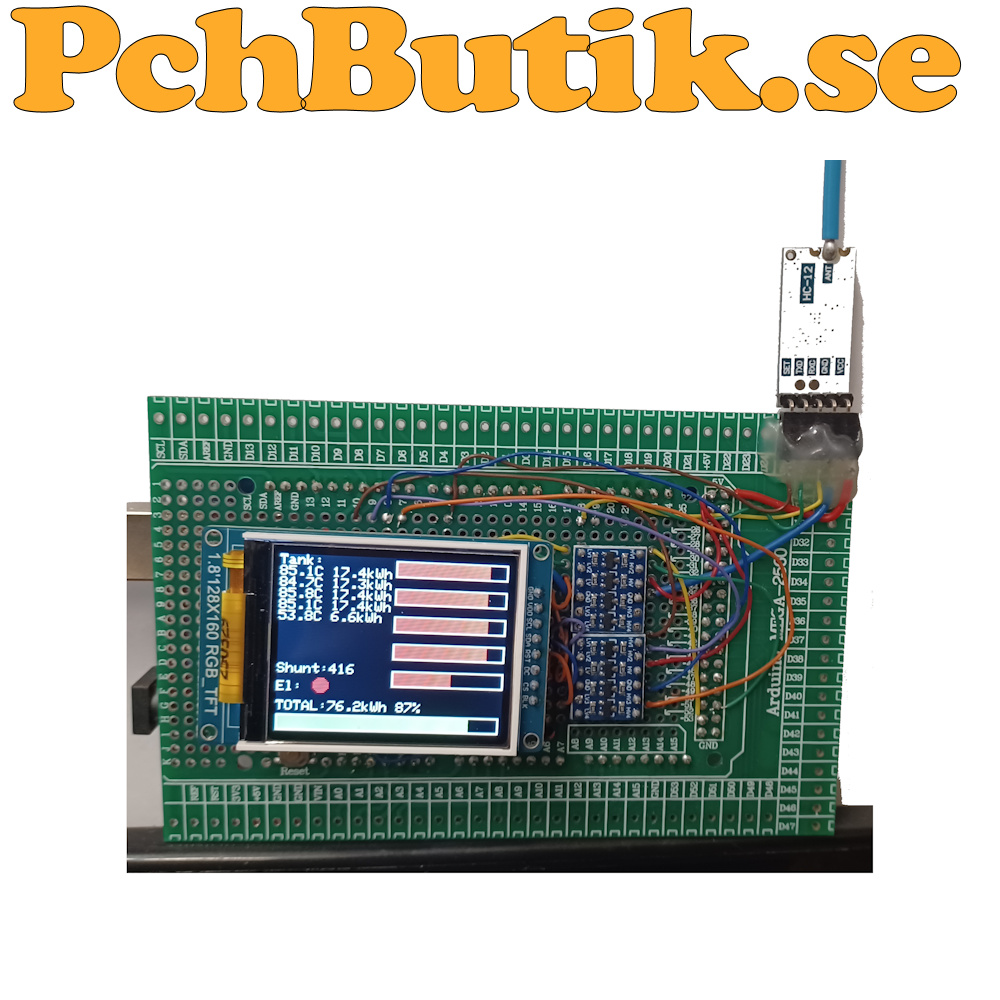
Mottagaren ûÊr en Mega2560 med shield och en display och en HC-12 pûË toppen.
Systemet ûÊr inte kalibrerat men ger en indikation pûË temperatur och kWh.
Koden fûÑr sûÊndaren vid ackumulator tankarna.
Det ûÊr en enkel kod som lûÊser av data och skickar data via RF.
Det ûÊr en enkel kod som lûÊser av data och skickar data via RF.
PlaytformIO, sûÊndaren. fil: 'main.cpp'
#include <Arduino.h>
#include <SoftwareSerial.h>
#include <math.h>
/* ---------- FUNCTION PROTOTYPES ---------- */
uint8_t calcCRC(const char *data);
void hc12Command(const char* cmd);
void initHC12();
float readNTC(int pin);
void sendPacket();
/* ---------- PIN ----------
* HC12 RX, TX och SET anvûÊnds fûÑr att kommunicera med HC12 modulen.
* RX och TX anvûÊnds fûÑr att skicka data till HC12 modulen.
* SET anvûÊnds fûÑr att sûÊtta HC12 modulen i sûÊndningslûÊge.
* Den ska vara HIGH nûÊr man skickar data och LOW nûÊr man inte skickar data ûÊr dûË i AT-command lûÊge.
*/
#define HC12_RX 9
#define HC12_TX 10
#define HC12_SET 4
/* ---------- TEMP ----------
* Vita XH-2.54-2P-kontakter anvûÊnds fûÑr att ansluta temperaturgivarna.
* FûÑre en NTC 10 kOhm 3950 ska pull-up-motstûËndet normalt vara: 10 kOhm
* 5 temperature sensors ûÊr NTC 10 kOhm 3950 med pull-up motstûËnd pûË 10 kOhm frûËn 5 Volt.
* De ûÊr placerade pûË olika stûÊllen av akumulatortanken.
* Akumulatortanken ûÊr pûË 750 liter, sûË 750 / 5 = 150 liter per sensor.
* ûr det vintertid och bûËda tankarna ûÊr paralellt ihop kopplade sûË ûÊr 1500 / 5 = 300 liter per sensor.
* Om 80 och efter 35 grader gûËr det inte att ta ut mera energi sûË ûÊr det 80 - 35 = 45 grader c
* DûË ûÊr det 7.9 kW per sensor vid 150 liter och 15.8 kW per sensor vid 300 liter.
* Eller 7.9 / 45 = 0.175 kW per grad vid 150 liter och 15.8 / 45 = 0.35 kW per grad vid 300 liter.
*/
#define TEMP1 A0
#define TEMP2 A1
#define TEMP3 A2
#define TEMP4 A3
#define TEMP5 A4
#define D1_PIN 5 //BlûË XH2.54-2P kontakt anvûÊnds ej
#define D2_PIN 6 //BlûË XH2.54-2P kontakt anvûÊnds ej
#define D3_PIN 7 //Vit XH2.54-3P kontakt Elpatron pûË eller av. Ljussensor pûË elpatronens lampa
/* ---------- ANALOG RANGE ----------
* Vit XH2.54-4P kontakt anvûÊnds fûÑr att lûÊsa av shuntens position, en pinne anûÊnds inte.
* Denna ûÊr en extra 10 Kohm potentiometer som anvûÊnds fûÑr att lûÊsa av shuntens position.
* RûÑrelse 90 grader av potentiometern motsvarar 0-100% ûÑppning av shunten.
* Det ûÊr inte en exakt avlûÊsning, utan mer en uppskattning av hur mycket shunten ûÊr ûÑppen.
*/
#define ANA1 A5
#define A1_MIN 300
#define A1_MAX 700
/* ---------- NTC CONST ---------- */
#define SERIES_RESISTOR 10000
#define NOMINAL_RESISTANCE 10000
#define NOMINAL_TEMPERATURE 25
#define B_COEFFICIENT 3950
/* ---------- SERIAL ---------- */
SoftwareSerial HC12(HC12_RX, HC12_TX);
/* ---------- TIMER ---------- */
unsigned long lastSend=0;
const unsigned long sendInterval=60000; // 60 sekunder mellan varje sûÊndning
/* ---------- D3 ûÊndras ---------- */
int lastD3State = HIGH;
unsigned long lastChangeTime = 0;
#define CHANGE_DEBOUNCE 50 // Skydd mot kontaktstuds och brus pûË D3, i millisekunder
/**
* LûÊs temperatur frûËn en NTC-termistor kopplad till angiven analog pinne.
*
* - LûÊser ADC med analogRead(pin) (10-bit: 0..1023).
* - Skyddar mot kantvûÊrden 0 och 1023 (delning med noll) och returnerar NAN i sûËdana fall.
* - BerûÊknar termistorns resistans i ett spûÊnningsdelararrangemang med SERIES_RESISTOR.
* Formeln: R_ntc = SERIES_RESISTOR * adc / (1023.0 - adc)
* - AnvûÊnder B-parameter-modellen (fûÑrenklad SteinhartãHart) fûÑr att rûÊkna ut temperatur i ô¯C.
*
* @param pin Analog ingûËngspin fûÑr NTC (A0..An).
* @return Temperatur i ô¯C (float). Returnerar NAN vid ogiltigt ADC-vûÊrde.
*/
float readNTC(int pin) {
int adc = analogRead(pin);
// Skydda mot delning med noll eller extremvûÊrden som ger ogiltig berûÊkning
if (adc <= 0 || adc >= 1023) {
return NAN;
}
// R_ntc = R_series * adc / (1023 - adc)
float resistance = SERIES_RESISTOR * (static_cast<float>(adc) / (1023.0f - static_cast<float>(adc)));
// SteinhartãHart (B-parameter) berûÊkning
float steinhart = resistance / NOMINAL_RESISTANCE; // (R/Ro)
steinhart = log(steinhart); // ln(R/Ro)
steinhart /= B_COEFFICIENT; // 1/B * ln(R/Ro)
steinhart += 1.0f / (NOMINAL_TEMPERATURE + 273.15f);// + 1/To
steinhart = 1.0f / steinhart; // K
steinhart -= 273.15f; // till ô¯C
return steinhart;
}
/**
* sendPacket
*
* Samlar in sensor- och ingûËngsvûÊrden, bygger en textbaserad telemetripayload,
* berûÊknar en 8-bitars CRC och skickar hela paketet ûÑver HC-12-modulen.
* Skriver ûÊven ut det skickade paketet till Serial-konsolen.
*
* Funktionalitet:
* - LûÊser fem temperaturer via readNTC(TEMP1..TEMP5) och konverterar varje
* float till kort ASCII med dtostrf().
* - LûÊser en analog vûÊrde av shunt potentiometer som raw.
* - LûÊser tre digitala ingûËngar med digitalRead(D1_PIN..D3_PIN).
* - Formaterar en payload i buffern (payload, storlek 140):
* "T1=<t1>;T2=<t2>;T3=<t3>;T4=<t4>;T5=<t5>;A1=<percent>;D1=<d1>;D2=<d2>;D3=<d3>"
* - BerûÊknar 8-bit CRC ûÑver payload med calcCRC(payload).
* - Bygger ett paket i buffern (packet, storlek 160) som omsluter payload och CRC:
* "<<payload>;CRC=<XX>>"
* dûÊr <XX> ûÊr CRC i tvûË stora hex-siffror.
* - SûÊtter HC12_SET HIGH, vûÊntar 10 ms, skickar paket med HC12.println(packet),
* vûÊntar 10 ms och sûÊtter sedan HC12_SET LOW.
* - Skriver det skickade paketet till Serial fûÑr debug.
*
* Noteringar och sidoeffekter:
* - Funktionen blockerar (anvûÊnder delay()).
* - UtfûÑr I/O: digitalWrite(HC12_SET), HC12.println(...), Serial.println(...).
* - AnvûÊnder globala konstanter/objekt: TEMP1..TEMP5, ANA1, D1_PIN..D3_PIN, HC12_SET,
* HC12 och Serial.
* - FûÑrlitar sig pûË hjûÊlpfunktioner: readNTC(), calcCRC(), dtostrf(), snprintf().
* - Buffertstorlekar ûÊr begrûÊnsade (payload: 140 byte, packet: 160 byte). snprintf
* trunkerar om strûÊngen blir fûÑr lûËng ã sûÊkerstûÊll att format och strûÊnglûÊngder
* hûËller sig inom grûÊnserna fûÑr att undvika informationsfûÑrlust.
*
* û
teranvûÊndbarhet / trûËdsûÊkerhet:
* - Ej reentrent: anvûÊnder delade hûËrdvaruresurser (HC12, Serial) och globala pinnar.
*
* Retur:
* - void. Transmitterar data som sidoeffekt; ingen felstatus returneras.
*/
void sendPacket(){
float t1 = readNTC(TEMP1);
float t2 = readNTC(TEMP2);
float t3 = readNTC(TEMP3);
float t4 = readNTC(TEMP4);
float t5 = readNTC(TEMP5);
int raw = analogRead(ANA1);
int d1 = digitalRead(D1_PIN);
int d2 = digitalRead(D2_PIN);
int d3 = digitalRead(D3_PIN);
char packet[160];
char payload[140];
char t1s[10], t2s[10], t3s[10], t4s[10], t5s[10];
dtostrf(t1,0,1,t1s);
dtostrf(t2,0,1,t2s);
dtostrf(t3,0,1,t3s);
dtostrf(t4,0,1,t4s);
dtostrf(t5,0,1,t5s);
snprintf(payload,sizeof(payload),
"T1=%s;T2=%s;T3=%s;T4=%s;T5=%s;A1=%d;D1=%d;D2=%d;D3=%d",
t1s,t2s,t3s,t4s,t5s,raw,d1,d2,d3);
uint8_t crc = calcCRC(payload);
snprintf(packet,sizeof(packet),
"<%s;CRC=%02X>",payload,crc);
digitalWrite(HC12_SET,HIGH);
delay(10);
HC12.println(packet);
delay(10);
digitalWrite(HC12_SET,LOW);
Serial.println("Sent:");
Serial.println(packet);
}
/**
* Skicka en kommandostrûÊng till HC-12 medan modulen sûÊtts i kommandolûÊge.
*
* - SûÊtter HC12_SET lûËg fûÑr att gûË in i AT-lûÊge (HC12_SET mûËste vara definierad och konfigurerad som OUTPUT).
* - VûÊntar 50 ms sûË att modulen hinner byta lûÊge.
* - Skriver den nullterminerade cmd-strûÊngen till HC12 (anvûÊnder den globala HC12-objektet).
* - VûÊntar 200 ms efter sûÊndning sûË att modulen hinner bearbeta kommandot.
*
* Viktigt:
* - Funktionen blockerar (anvûÊnder delay) och fûËr inte anvûÊndas i avbrottshanterare eller andra tidskritiska sammanhang.
* - HC12_SET lûÊmnas LOW nûÊr funktionen returnerar; anroparen ansvarar fûÑr att sûÊtta den HIGH om sûË ûÑnskas.
* - Funktionen lûÊgger inte automatiskt till radslut (CR/LF); inkludera dessa i cmd-strûÊngen om modulen krûÊver dem.
* - Ingen felrapportering utfûÑrs.
*
* FûÑrutsûÊttningar:
* - HC12 (SoftwareSerial) mûËste vara initierad.
* - HC12_SET mûËste vara definierad och konfigurerad som OUTPUT.
* - cmd mûËste vara en giltig, nullterminerad C-strûÊng (nullptr ger undefined behaviour).
*
* Exempel:
* hc12Command("AT+VERSION\r\n");
*/
void hc12Command(const char* cmd){
digitalWrite(HC12_SET,LOW);
delay(50);
HC12.print(cmd);
//HC12.print("\r\n");
delay(200);
}
/**
* Initierar och konfigurerar HC-12 trûËdlûÑs transceiver.
*
* Beskrivning:
* - Skriver en initieringsrad till Serial fûÑr felsûÑkning.
* - SûÊtter HC12 i AT-lûÊge genom att styra HC12_SET-pinnen och vûÊntar kort.
* - Skickar ett antal AT-kommandon via hc12Command() fûÑr att stûÊlla in kanal,
* uteffekt och driftlûÊge:
* - "AT" : kontroll/test av anslutning
* - "AT+C003" : vûÊlj kanal 3
* - "AT+P5" : sûÊtt uteffekt till nivûË ~10 mW
* - "AT+FU3" : vûÊlj stabilt driftlûÊge
* - LûÊmnar slutligen modulen i normalt (mottagnings)lûÊge och vûÊntar kort.
*
* Biverkningar/krav:
* - Funktionen blockerar kûÑrningen p.g.a. anvûÊndning av delay().
* - FûÑrutsûÊtter att HC12_SET, Serial och funktionen hc12Command() ûÊr korrekt
* definierade och initialiserade i omgivande kod.
*
* Parametrar: inga
* ReturvûÊrde: ingen (void)
*/
void initHC12(){
Serial.println("Init HC12");
// Se till att HC12 ûÊr i AT-lûÊge innan vi skickar kommandon
digitalWrite(HC12_SET, LOW);
delay(50);
hc12Command("AT");
hc12Command("AT+C003"); // kanal 3
hc12Command("AT+P7"); // ~??mW
hc12Command("AT+FU3"); // stabilt lûÊge
hc12Command("AT+RX"); // get all
// LûÊmna HC12 i normalt (mottagnings)lûÊge efter init
digitalWrite(HC12_SET, LOW);
delay(50);
}
/**
* BerûÊkna enkel 8-bit XOR-checksumma ûÑver en nullterminerad C-strûÊng.
*
* Itererar ûÑver varje byte i strûÊngen (terminerande '\0' ingûËr inte) och
* kombinerar dem med bitvis XOR. Om en nullpekare skickas tillbaka 0.
*
* @param data Pekare till nullterminerad C-strûÊng.
* @return 8-bit checksum som uint8_t.
*/
uint8_t calcCRC(const char *data){
if(data == nullptr) return 0;
uint8_t crc = 0;
while(*data){
crc ^= static_cast<uint8_t>(*data++);
}
return crc;
}
/**
* @brief Initiera pins, seriella grûÊnssnitt och HC-12.
*
* Konfigurerar HC12_SET som OUTPUT och sûÊtter den LOW, aktiverar interna pull-ups
* fûÑr D1/D2/D3, startar Serial och HC12-SoftwareSerial, vûÊntar kort och kûÑr initHC12().
* LûÊser ûÊven initialt D3-tillstûËnd fûÑr att undvika falsk ûÊndringsdetektion direkt efter boot.
*/
void setup() {
pinMode(HC12_SET, OUTPUT);
digitalWrite(HC12_SET, LOW);
pinMode(D1_PIN, INPUT_PULLUP);
pinMode(D2_PIN, INPUT_PULLUP);
pinMode(D3_PIN, INPUT_PULLUP);
Serial.begin(9600);
HC12.begin(9600);
delay(300); // lûËt hûËrdvara och serial stabilisera
initHC12();
// LûÊs initialt D3-tillstûËnd och tidsstûÊmpel fûÑr debounce-logiken
lastD3State = digitalRead(D3_PIN);
lastChangeTime = millis();
Serial.println("HC12 Ready");
}
/**
* loop()
*
* Huvudloopen som gûÑr tre saker varje varv:
*
* 1) Periodisk sûÊndning
* - Kontrollerar om tiden sedan senaste sûÊndning (millis() - lastSend)
* ûÊr >= sendInterval. Om ja sûË ûÑkar lastSend med sendInterval och
* anropar sendPacket() fûÑr att skicka.
* - Att addera intervallet (lastSend += sendInterval) minskar kumulativt
* tidsdrift jûÊmfûÑrt med att sûÊtta lastSend = millis().
*
* 2) AvkûÊnning av fûÑrûÊndring pûË D3 med debounce
* - LûÊser aktuell pinne och jûÊmfûÑr mot lastD3State.
* - Om fûÑrûÊndring och mer ûÊn CHANGE_DEBOUNCE ms har passerat sûË accepteras
* fûÑrûÊndringen: uppdatera lastChangeTime, lastD3State, skriv debugmeddelande
* och anropa sendPacket().
*
* 3) Debug/ vidarebefordran av inkommande HC12-data
* - Medan HC12.available() lûÊser varje byte och skriver den till Serial.
*
* Kommentarer:
* - TidsjûÊmfûÑrelser anvûÊnder millis()-differenser och ûÊr robusta mot rullning.
* - Debounce-tiden kan behûÑva finjusteras fûÑr den faktiska hûËrdvaran.
*/
void loop(){
/* TIMER SûNDNING */
if(millis() - lastSend >= sendInterval){
lastSend += sendInterval;
sendPacket();
}
/* D3 CHANGE DETECT */
int current = digitalRead(D3_PIN);
if(current != lastD3State){
if(millis() - lastChangeTime > CHANGE_DEBOUNCE){
lastChangeTime = millis();
lastD3State = current;
Serial.println("D3 changed ã sending packet");
sendPacket();
}
}
/* DEBUG RX */
while(HC12.available())
Serial.write(HC12.read());
}
Koden fûÑr mottagaren.
Det ûÊr en enkel kod som visar inkommande data pûË en liten display.
Det ûÊr en enkel kod som visar inkommande data pûË en liten display.
PlaytformIO, mottagaren. fil: 'main.cpp'
#include <Arduino.h>
#include <U8g2lib.h>
#include <Arduino_GFX_Library.h>
/*
* Koden ûÊr skapad av PchButik.se med hjûÊlp av AI
* HC-12 VCC ã 5V
* HC-12 GND ã GND
* HC-12 TXD ã Pin 19 (RX1)
* HC-12 RXD ã Pin 18 (TX1)
* HC-12 SET ã pin 4 (SET)
* Query-kommandon anvûÊnder R-prefix (RC/RP/RB/RF)
* ?-kommandon stûÑds inte i denna firmwaregren
* AT+RX fungerar alltid och ûÊr sûÊkraste statusdump
*/
#define BLACK 0x0000
#define WHITE 0xFFFF
#define RED 0xF800
#define GREEN 0x07E0
#define BLUE 0x001F
#define YELLOW 0xFFE0
#define CYAN 0x07FF
#define MAGENTA 0xF81F
#define ORANGE 0xFD20
/* ---------- HC12 SERIAL ---------- */
#define HC12 Serial1
//AT-kommandon GET
const char* AT_GET_VERSION = "AT+V";
const char* AT_GET_BAUD = "AT+RB";
const char* AT_GET_CHANNEL = "AT+RC";
const char* AT_GET_POWER = "AT+RP";
const char* AT_GET_RADIO_MODE = "AT+RF";
const char* AT_GET_ALL = "AT+RX";
//Pinnar
#define HC12_SET 4
#define WINTER_MODE 1 // 0 = sommar (1 tank) | 1 = vinter (2 tankar)
#define LITER_PER_SENSOR 150.0
#define MIN_TEMP 35.0
#define MAX_TEMP 85.0
#define WATER_CP 4.186 // kJ/kgô¯C
/* More data bus class: https://github.com/moononournation/Arduino_GFX/wiki/Data-Bus-Class */
Arduino_DataBus *bus = new Arduino_HWSPI(8,10);
Arduino_GFX *gfx = new Arduino_ST7735(bus, 9, 3, false,128, 160, 2, 1, 2, 1,false); //art. 3273 // MûËste anpassas fûÑr din skûÊrm.
/* ---------- DATA STORAGE ---------- */
float T[5]={0};
int shuntRaw=0;
int D1=0,D2=0,D3=0;
/* ----------Functions------ */
/* ---------- CRC ---------- */
/**
* @brief BerûÊkna en 8-bitars kontrollsumma genom XOR av varje byte i en nullterminerad strûÊng.
*
* Itererar ûÑver bytes i den angivna null-terminerade C-strûÊngen och
* ackumulerar en enkel kontrollsumma genom bitvis XOR av varje byte
* i en 8-bitars accumulator. Detta ûÊr en lûÊttviktig checksumma (inte
* en formell CRC) och ger grundlûÊggande felupptûÊckt.
*
* @param data Pekare till en nullterminerad C-strûÊng. Bearbetningen
* stoppar vid fûÑrsta NUL ('\0'). FûÑr binûÊra buffertar som
* kan innehûËlla NUL, anvûÊnd en variant som tar en lûÊngd.
*
* @return uint8_t Resultatet av 8-bitars XOR-checksumman. Tom strûÊng ger 0.
*
* @note Varje char behandlas som en rûË byte; tecknets signedness hanteras
* genom konvertering till uint8_t vid XOR. Komplextet ûÊr O(n).
*/
uint8_t calcCRC(const char *data){
uint8_t crc=0;
while(*data) crc ^= *data++;
return crc;
}
/* ---------- PAKETPARSER ---------- */
/**
* parsePacket
*
* Parsar en skrivbar, null-terminerad ASCII-paketstrûÊng som innehûËller sensordata/telemetri
* och en avslutande CRC-markûÑr (";CRC=xx"). Om CRC stûÊmmer extraheras numeriska vûÊrden
* frûËn vûÊlkûÊnda nycklar och lagras i globala variabler.
*
* Parametrar:
* msg - pekare till en skrivbar, null-terminerad C-strûÊng med paketet. Funktionen
* kommer att modifiera bufferten (ersûÊtter ';' fûÑre CRC med '\0').
*
* Beteende:
* 1. SûÑker efter substringen ";CRC=" i msg. Om den inte finns returneras funktionen omedelbart.
* 2. LûÊser det hexadecimala CRC-vûÊrdet som fûÑljer ";CRC=" med strtol(...,16) till rxCRC (uint8_t).
* 3. ErsûÊtter ';' vid CRC-markûÑren med '\0' fûÑr att terminera meddelandedelen som ska CRC-kalkyleras.
* 4. BerûÊknar CRC ûÑver den trunkerade msg med calcCRC(msg) och jûÊmfûÑr mot rxCRC.
* Vid avvikelse skrivs "CRC FAIL" till Serial och funktionen returnerar.
* 5. Om CRC matchar sûÑker funktionen i den trunkerade msg efter fûÑljande nycklar (strstr):
* - "T1=", "T2=", "T3=", "T4=", "T5=" -> parsas med atof(...) och sparas i T[0..4]
* - "A1=" -> parsas med atoi(...) och sparas i shuntRaw
* - "D1=", "D2=", "D3=" -> parsas med atoi(...) och sparas i D1, D2, D3
* FûÑr varje funnen nyckel startar numerisk konvertering direkt efter '='. Om en nyckel
* saknas ûÊndras den inte.
*
* Biverkningar / globala som ûÊndras:
* - ûverskriver *crcPos med '\0' (modifierar msg-bufferten).
* - Kan skriva "CRC FAIL" till Serial vid CRC-missmatch.
* - Uppdaterar globala: T[] (0..4), shuntRaw, D1, D2, D3.
*
* FûÑrutsûÊttningar / noteringar:
* - msg mûËste vara skrivbar (funktionen skriver en NUL).
* - msg mûËste vara null-terminerad.
* - CRC-vûÊrdet mûËste vara hexadecimalt; strtol accepterar bûËde "0x" och rena hex-siffror.
* - calcCRC(msg) fûÑrvûÊntas vara kompatibel med det insûÊnda vûÊrdet.
* - atof/atoi anvûÊnds fûÑr konvertering:
* - atof accepterar decimalpunkt '.' fûÑr brûËkdel.
* - atoi/atof returnerar 0 vid parse-fel eller om vûÊrdet ûÊr noll.
*
* Exempelpaket:
* "T1=23.5;T2=19.0;A1=1023;D1=1;D2=0;CRC=AB"
*
* Felhantering:
* - Om ";CRC=" saknas eller CRC inte matchar returnerar funktionen tidigt och ûÊndrar inte
* de numeriska globala (fûÑrutom modifiering av msg-bufferten).
*/
void parsePacket(char *msg){
char *crcPos = strstr(msg,";CRC=");
if(!crcPos) return;
uint8_t rxCRC = strtol(crcPos+5,NULL,16);
*crcPos=0;
if(calcCRC(msg)!=rxCRC){
Serial.println("CRC FAIL");
return;
}
char *p;
if((p=strstr(msg,"T1="))) T[0]=atof(p+3);
if((p=strstr(msg,"T2="))) T[1]=atof(p+3);
if((p=strstr(msg,"T3="))) T[2]=atof(p+3);
if((p=strstr(msg,"T4="))) T[3]=atof(p+3);
if((p=strstr(msg,"T5="))) T[4]=atof(p+3);
if((p=strstr(msg,"A1="))) shuntRaw=atoi(p+3);
if((p=strstr(msg,"D1="))) D1=atoi(p+3);
if((p=strstr(msg,"D2="))) D2=atoi(p+3);
if((p=strstr(msg,"D3="))) D3=atoi(p+3);
}
/* ---------- DRAW BAR ---------- */
/**
* @brief Ritar en horisontell progress-/fyllningsstapel med vit kant och fûÊrgad inre del.
*
* @param x VûÊnster pixelkoordinat fûÑr ytterrektangeln.
* @param y ûvre pixelkoordinat fûÑr ytterrektangeln.
* @param w Bredd i pixlar fûÑr ytterrektangeln (bûÑr vara >= 2 fûÑr inre yta).
* @param h HûÑjd i pixlar fûÑr ytterrektangeln (bûÑr vara >= 2).
* @param value Aktuellt vûÊrde som ska representeras; mappas proportionellt till fyllbredden.
* @param max VûÊrdet som motsvarar fullt fylld stapel (mûËste vara > 0 fûÑr korrekt beteende).
* @param col 16-bit fûÊrg som anvûÊnds fûÑr fyllningen.
*
* Beteende:
* - Ritar en vit ytterrektangel pûË (x, y) med storlek (w, h).
* - BerûÊknar inre fyllbredd med map(value, 0, max, 0, w - 2).
* - Fyller den inre rektangeln pûË (x+1, y+1) med bredd = fill och hûÑjd = h - 2 i fûÊrgen col.
*
* Noteringar / fûÑrutsûÊttningar:
* - Funktionen fûÑrutsûÊtter att en global pekare `gfx` och fûÊrgkonstanten WHITE finns.
* - FûÑr att undvika extrapolering bûÑr caller klippa value till intervallet [0, max].
* - Om w < 2 eller h < 2 blir inre yta <= 0; beteendet ûÊr ej definierat.
* - Om max == 0 blir mappningen felaktig; sûÊkerstûÊll max > 0 innan anrop.
*/
void drawBar(int x,int y,int w,int h,int value,int max,uint16_t col){
gfx->drawRect(x,y,w,h,WHITE);
int fill = map(value,0,max,0,w-2);
gfx->fillRect(x+1,y+1,fill,h-2,col);
}
/**
* @brief BerûÊknar energi som krûÊvs fûÑr att vûÊrma vattnet fûÑr en sensor.
*
* Funktionen:
* - BegrûÊnsar temperaturen till intervallet [MIN_TEMP, MAX_TEMP].
* - BerûÊknar temperaturskillnaden frûËn MIN_TEMP.
* - BestûÊmmer antalet tankar: 2.0 om WINTER_MODE ûÊr sann, annars 1.0.
* - Konverterar volym till massa: mass = LITER_PER_SENSOR * tanks (1 L ã 1 kg).
* - BerûÊknar energi i kilojoule: kJ = mass * WATER_CP * (temp - MIN_TEMP).
* - Returnerar energi i kilowattimmar: kWh = kJ / 3600.0.
*
* @param temp MûËlvûÊrme i samma enhet som MIN_TEMP/MAX_TEMP (vanligtvis ô¯C).
* @return Energi i kWh. Observera att vûÊrdet ibland visas som "kWh" i UI:t,
* men den hûÊr funktionen returnerar kWh.
*
* Antaganden/Kommentarer:
* - Om temp < MIN_TEMP sûÊtts temp = MIN_TEMP (resultat = 0).
* - Om temp > MAX_TEMP sûÊtts temp = MAX_TEMP.
* - Inga sidoeffekter; ren berûÊkning som anvûÊnder globala konstanter:
* MIN_TEMP, MAX_TEMP, WINTER_MODE, LITER_PER_SENSOR, WATER_CP.
*/
float calcEnergy(float temp){
if(temp < MIN_TEMP) temp = MIN_TEMP;
if(temp > MAX_TEMP) temp = MAX_TEMP;
float delta = temp - MIN_TEMP;
float tanks = WINTER_MODE ? 2.0 : 1.0;
float mass = LITER_PER_SENSOR * tanks; // kg (1L ã 1kg)
float kJ = mass * WATER_CP * delta;
return kJ / 3600.0;
}
/**
* ---------- DRAW SCREEN ----------
* void drawScreen()
*
* Renderar hela UI-skûÊrmen som visar tanktemperaturer, per-sensor energi,
* en aggregerad totalenergibar, shuntens rûËvûÊrde och en digital indikator.
*
* Beteende:
* - Rensar displayen och stûÊller in standardkursor/textfûÊrg.
* - Skriver en rubrik "Tank:".
* - FûÑr varje av 5 temperaturgivare (T[0]..T[4]):
* - Anropar calcEnergy(T[i]) fûÑr att berûÊkna energibidraget (kWh).
* - Ackumulerar totalEnergy och maxTotal (baserat pûË LITER_PER_SENSOR, WINTER_MODE, WATER_CP och temperaturrange).
* - Skriver ut temperaturen (1 decimal) fûÑljt av sensorns energi i kW (1 decimal).
* - Ritar en horisontell rûÑd stapel som representerar temperaturen med drawBar pûË en fix x-position.
* - BerûÊknar percent = (totalEnergy / maxTotal) * 100 och visar:
* - "TOTAL:"-etikett, totalEnergy (1 decimal, kWh) och percent (0 decimaler, %).
* - En grûÑn totalenergiprogressbar lûÊngst ner.
* - Visar "Shunt:" och aktuellt shuntRaw-vûÊrde pûË en fast position.
* - Visar "El:" och en statuscirkel (vit nûÊr digital ingûËng D3 ûÊr sann, rûÑd nûÊr falsk).
*
* Antaganden / beroenden:
* - Pekaren `gfx` finns och erbjuder:
* fillScreen(color), setCursor(x,y), setTextColor(color), print(...), println(...), fillCircle(x,y,r,color).
* - HjûÊlpfunktioner och globala som anvûÊnds:
* calcEnergy(float temp) -> float (returnerar kWh),
* drawBar(int x,int y,int w,int h,int value,int max,uint16_t col),
* Konstanter: BLACK, WHITE, RED, GREEN, WINTER_MODE, LITER_PER_SENSOR, WATER_CP, MAX_TEMP, MIN_TEMP.
* Globala: float T[5], int shuntRaw, digitala D3.
*
* Koordinat-/layoutnoteringar (sûË som implementerat):
* - Titel och per-sensor text bûÑrjar vid (0,0); vertikalt mellanrum ã 20 px.
* - Per-sensor staplar ritas vid x=80, y = i*20+2, storlek 80x12.
* - Shunt skrivs nûÊra y=78; "El:" och dess statuscirkel nûÊra y=91 med cirkelns centrum i (30,93), radie 5.
* - Total summering skrivs vid y=105; totalbar vid y=115 med bredd 158 och hûÑjd 12.
*
* Kanthantering & fûÑrslag:
* - Skydda mot division med noll nûÊr maxTotal == 0 innan berûÊkning av percent.
* - Byt ut magiska tal (positioner, storlekar, antal sensorer) mot namngivna konstanter fûÑr bûÊttre underhûËll.
* - ûvervûÊg klippning/avrundning och kulturberoende formatering fûÑr visade vûÊrden.
* - Om uppdateringsfrekvens eller flimmer ûÊr ett problem: uppdatera endast de regioner som ûÊndrats istûÊllet fûÑr att rensa hela skûÊrmen varje bildruta.
*
* TrûËdsûÊkerhet / sidoeffekter:
* - Inte trûËdsûÊker; uppdaterar delad displaystatus och lûÊser globala variabler.
*/
void drawScreen(){
gfx->fillScreen(BLACK);
gfx->setCursor(0,0);
gfx->setTextColor(WHITE);
gfx->setCursor(0,0);
gfx->println("Tank:");
float totalEnergy=0;
float maxTotal=0;
float tanks = WINTER_MODE ? 2.0 : 1.0;
float mass = LITER_PER_SENSOR * tanks;
float maxPerSensor = (mass * WATER_CP * (MAX_TEMP-MIN_TEMP))/3600.0;
/* TEMPERATURES + ENERGY */
for(int i=0;i<5;i++){
float e = calcEnergy(T[i]);
totalEnergy += e;
maxTotal += maxPerSensor;
// gfx->print("T");
// gfx->print(i+1);
// gfx->print(": ");
gfx->print(T[i],1);
gfx->print("C ");
gfx->print(e,1);
gfx->println("kWh");
drawBar(80, i*20+2,80,12,T[i],100,RED);
}
/* TOTAL ENERGY BAR */
float percent = (totalEnergy/maxTotal)*100.0;
gfx->setCursor(0,105);
gfx->print("TOTAL:");
gfx->print(totalEnergy,1);
gfx->print("kWh ");
gfx->print(percent,0);
gfx->println("%");
drawBar(0,115,158,12,percent,100,GREEN);
/* SHUNT RAW */
gfx->setCursor(0,78);
gfx->print("Shunt:");
gfx->println(shuntRaw);
/* DIGITAL */
gfx->setCursor(0,91);
gfx->print("El:");
gfx->fillCircle(30,93,5, D3?WHITE:RED);
}
/**
* ---------- SETUP ---------- *
*
* @brief Initierar hûËrdvaruperiferier och fûÑrbereder mottagarens UI.
*
* KûÑrs en gûËng vid programstart. UtfûÑr fûÑljande:
* - Initierar hûËrdvaru-Serial fûÑr debug pûË 9600 baud.
* - Initierar HC12-radio pûË 9600 baud.
* - Initierar displayobjektet, rensar skûÊrmen till BLACK och sûÊtter textstorlek till 1.
* - Skriver "Receiver ready" till Serial-konsolen.
*
* @note Antas att globala objekt/handtag Serial, HC12 och gfx ûÊr korrekt konstruerade
* och tillgûÊngliga innan denna funktion anropas.
* @pre Serial, HC12 och gfx mûËste vara giltiga och deras begin()-metoder anropbara.
* @post Serial och HC12 ûÊr konfigurerade till 9600 baud. Displayen ûÊr rensad och klar fûÑr text.
*/
void setup(){
Serial.begin(9600);
HC12.begin(9600);
gfx->begin();
gfx->fillScreen(BLACK);
gfx->setTextSize(1);
Serial.println("Receiver ready");
}
/* ---------- LOOP ---------- */
/**
* @brief Arduino loop-hanterare: ta emot, parsa och validera paket frûËn HC12-radio.
*
* LûÊs kontinuerligt bytes frûËn HC12-serien och bygg paket avgrûÊnsade med
* '<' (start) och '>' (slut) i en statisk teckenbuffert. Vid slutavgrûÊnsare
* terminera paketet, skriv ut det till Serial, gûÑr en kopia, anropa parsePacket(...)
* och jûÊmfûÑr buffern med kopian fûÑr att avgûÑra om paketet klarade CRC/validering.
* SkûÊrmen uppdateras med drawScreen() efter varje paket.
*
* Beteende:
* - AnvûÊnder static char buf[180] och static byte idx fûÑr ackumulering ûÑver anrop.
* - '<' ûËterstûÊller index fûÑr att pûËbûÑrja nytt paket.
* - '>' terminera buffern, skriv ut, kopiera, anropa parsePacket(buf), jûÊmfûÑr med kopian
* och skriv "CRC OK" eller "CRC ERROR". Anropa drawScreen() och nollstûÊll idx.
* - ûvriga tecken lûÊggs till bufferten om idx < 179 (plats fûÑr avslutande NUL).
*
* Antaganden och begrûÊnsningar:
* - HC12 implementerar available() och read() (Stream-liknande).
* - Valideringslogiken fûÑrutsûÊtter att parsePacket muterar buf vid framgûËng; detta ûÊr skûÑrt ã
* bûÊttre ûÊr att parsePacket returnerar explicit status.
* - Ingen timeout eller utfûÑrlig hantering av fûÑr lûËnga paket utûÑver buffertstorleken.
* - Payload som innehûËller '<' eller '>' bryter framer eftersom inga escape-mekanismer finns.
* - ûverflûÑd (index >=179) ignoreras i dagslûÊget utan felrapportering.
*
* FûÑrbûÊttringsfûÑrslag:
* - LûËt parsePacket returnera success/failure i stûÊllet fûÑr att jûÊmfûÑra buffrar.
* - LûÊgg till paket-timeout och explicit ûÑverflûÑdes-/felhantering.
* - Implementera en enkel state-machine som stûÑdjer escaping om payloads kan innehûËlla
* avgrûÊnsartecken.
* - AnvûÊnd lûÊngdbaserade och bounds-kontrollerade API:er och undvik tysta truncations.
*
* @return void
*/
void loop(){
static char buf[180];
static byte idx=0;
while(HC12.available()){
char c = HC12.read();
if(c=='<') idx=0;
else if(c=='>'){
buf[idx]=0;
Serial.print("RAW: ");
Serial.println(buf);
char test[180];
strcpy(test,buf);
parsePacket(buf);
if(strcmp(buf,test)==0)
Serial.println("CRC ERROR");
else
Serial.println("CRC OK");
drawScreen();
idx=0;
}
else if(idx<179){
buf[idx++]=c;
}
}
}
ÿ£¢

HC 12 trûËdlûÑs 433 MHz modul med UART och lûËng rûÊckvidd
HC 12 trûËdlûÑs 433 MHz modul med UART och lûËng rûÊckvidd

UNO kort, Budget-version av ARDUINO UNO R3

2-Pack, Experimentkort fûÑr Arduino UNO. Protobord, Shield, PCB

MEGA 2560 kort med CH340G USB interface.
Experiment shield fûÑr MEGA2560 med skruvterminaler

10st Stiftlist 1x40 pinnar. Passar moduler till Arduino

XH2.54

1.8 tum, fullfûÊrgs skûÊrm 128x160 pixel

6 st hylslist 1x40 pol. Standard delning 2.54 mm

Antenn 2.4GHz SMA koaxial kabel till IPX, 100mm

2 st. NivûË omvandlare 5V till 3.3V bûËda riktningar 4 kanaler, passar Arduino

Ljusdetektor med justerbar kûÊnslighet

Justerbar DC-DC step-down spûÊnnings omvandlare LM2596

100 st MotstûËnd 10000 Ohm, 10K metallfilm 1 %.

1 Meter. NTC Temperature Sensor 10K 3950

Air och wrapping trûËd 8 fûÊrger.

10K Potentiometer 2W
Hitta i vûËr butik
HC 12 trûËdlûÑs 433 MHz modul med UART och lûËng rûÊckvidd
HC 12 trûËdlûÑs 433 MHz modul med UART och lûËng rûÊckvidd
UNO kort, Budget-version av ARDUINO UNO R3
2-Pack, Experimentkort fûÑr Arduino UNO. Protobord, Shield, PCB
MEGA 2560 kort med CH340G USB interface.
Experiment shield fûÑr MEGA2560 med skruvterminaler
10st Stiftlist 1x40 pinnar. Passar moduler till Arduino
XH2.54
1.8 tum, fullfûÊrgs skûÊrm 128x160 pixel
6 st hylslist 1x40 pol. Standard delning 2.54 mm
Antenn 2.4GHz SMA koaxial kabel till IPX, 100mm
2 st. NivûË omvandlare 5V till 3.3V bûËda riktningar 4 kanaler, passar Arduino
Ljusdetektor med justerbar kûÊnslighet
Justerbar DC-DC step-down spûÊnnings omvandlare LM2596
100 st MotstûËnd 10000 Ohm, 10K metallfilm 1 %.
1 Meter. NTC Temperature Sensor 10K 3950
Air och wrapping trûËd 8 fûÊrger.
10K Potentiometer 2W